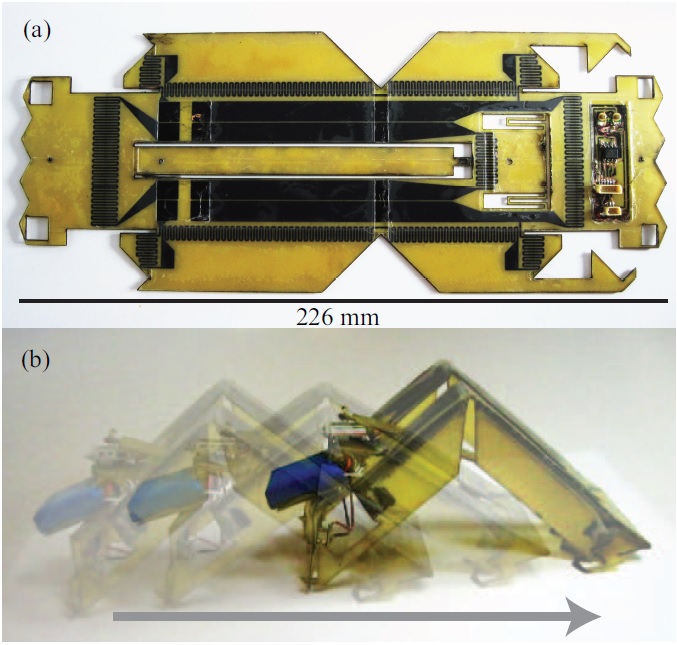
Robot self-assembly by folding: a printed inchworm robot
Printing and folding are fast and inexpensive methods for prototyping complex machines. Self-assembly of the folding step would expand the possibilities of this method to include applications where external manipulation is costly, such as micro-assembly, mass production, and space applications. This paper presents a method for self-folding of printed robots from two-dimensional materials based on shape memory polymers actuated by joule heating using embedded circuits. This method was shown to be capable of sequential folding, angle-controlled folds, slot-and-tab assembly, and mountain and valley folds. An inchworm robot was designed to demonstrate the merits of this technique.
pdfVideo 1
IEEE Spectrum