Projects
Published Research Projects
These are some of the major research projects I got to work on. You can see a full list of my publications here.
Self-Folding Machines
As part of a larger effort to develop Printable Programmable Machines, we developed and tested different ways to make structures and mechanisms that fold themselves from flat sheets.
Shape Memory Composites
Shape memory polymers (SMPs) undergo a preprogrammed shape change (typically contraction) when heated to a certain temperature. 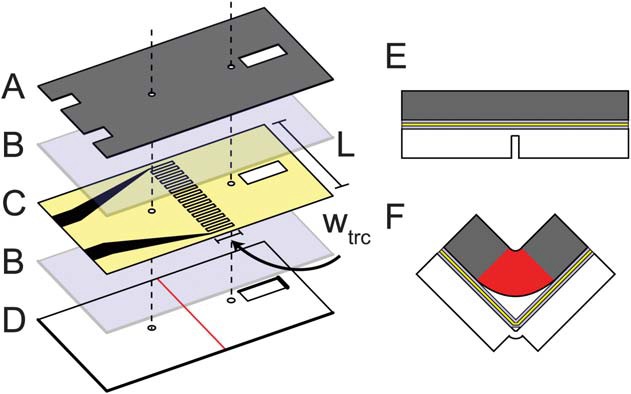 Examples include shrink wrap and heat shrink tubing. By laminating sheets of SMP with structural layers and flexible circuit boards, we created low-profile actuators that would fold the laminate into a 3D form. These could be activated by oven or heat lamp for uniform activation, or embedded resistive heaters to enable sequential folding.
Examples include shrink wrap and heat shrink tubing. By laminating sheets of SMP with structural layers and flexible circuit boards, we created low-profile actuators that would fold the laminate into a 3D form. These could be activated by oven or heat lamp for uniform activation, or embedded resistive heaters to enable sequential folding. 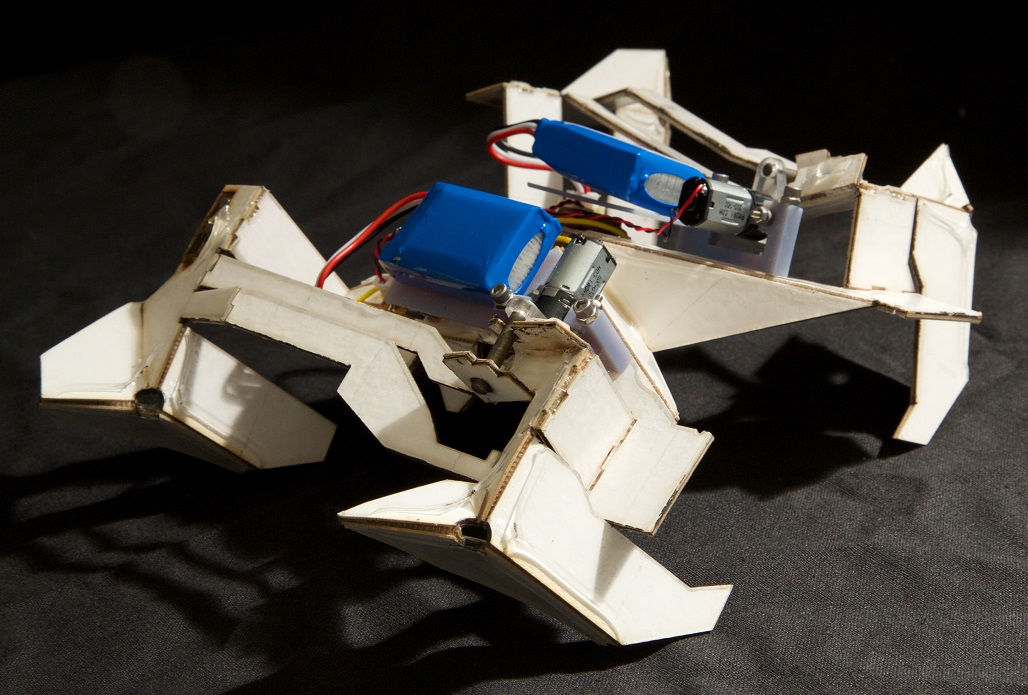 At centimeter length scales we used paper as the substrate due to its light weight. At millimeter length scales we used aluminum (for uniform activation) or fiberglass laminate (for sequential activation) because they were stiffer and allowed for more precise fabrication methods. Using these techniques, we demonstrated a variety of machines.
At centimeter length scales we used paper as the substrate due to its light weight. At millimeter length scales we used aluminum (for uniform activation) or fiberglass laminate (for sequential activation) because they were stiffer and allowed for more precise fabrication methods. Using these techniques, we demonstrated a variety of machines.
Other actuation methods
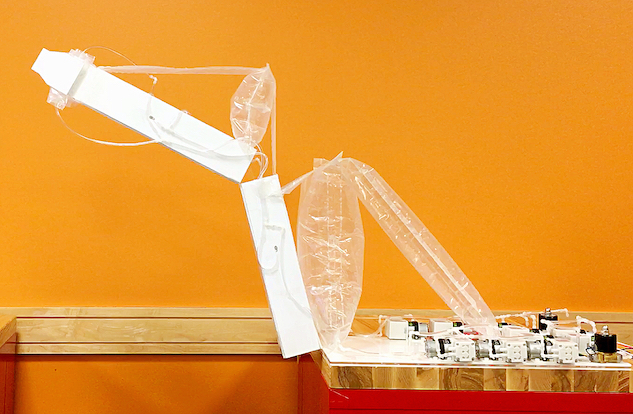 We also experimented with other methods of low-profile actuation. Electrostatics were faster and reversible, but were not well-suited for rigid structures. Pneumatics were also relatively fast and reversible, and could be made inexpensively using the `pouch motor’ concept. These were effective for meter-scale machines.
We also experimented with other methods of low-profile actuation. Electrostatics were faster and reversible, but were not well-suited for rigid structures. Pneumatics were also relatively fast and reversible, and could be made inexpensively using the `pouch motor’ concept. These were effective for meter-scale machines.
Origami Dynamics
The self-folding methods we had studied were slow, unreliable, and resulted in flimsy machines. 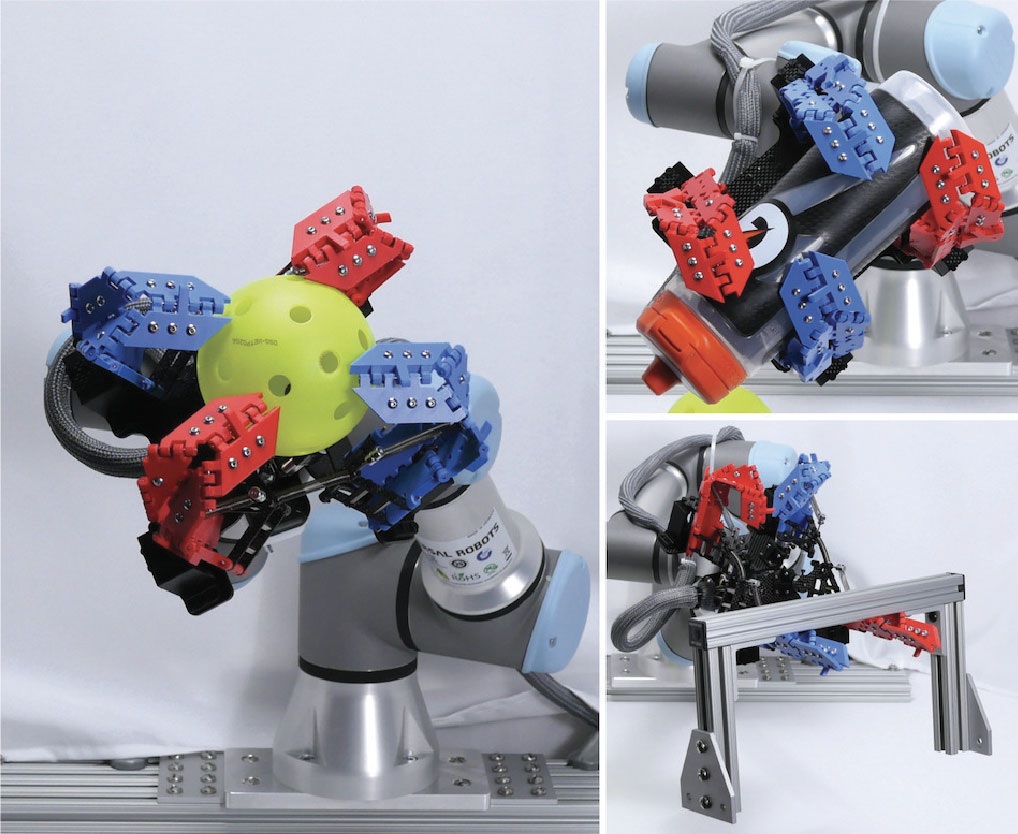 As an alternative, we explored the dynamic behavior of origami structures, particularly near the flat-unfolded state. We found that structures that were generally stiff and kinematically constrained became flexible when almost flat, and the fold direction of the hinges could be manipulated to create substantially different outputs based on the dynamic input. We developed a model to predict and control this behavior, and applied it to make a robotic gripper that could peform multiple types of grasps with a single actuated input.
As an alternative, we explored the dynamic behavior of origami structures, particularly near the flat-unfolded state. We found that structures that were generally stiff and kinematically constrained became flexible when almost flat, and the fold direction of the hinges could be manipulated to create substantially different outputs based on the dynamic input. We developed a model to predict and control this behavior, and applied it to make a robotic gripper that could peform multiple types of grasps with a single actuated input.
Soft Robotic Grippers for Seafood Processing
 As part of a project for the ARM Institute, we developed a soft robotic gripper with a tactile sensor for sorting fish be feel. In seafood processing, younger fish are separated from older fish, and workers differentiate them by how soft the fish feels in their hands. We developed a new fabrication method to rapidly prototype durable pneumatic fingers. We then designed a hardness sensor embedded in soft materials and gentle enough to probe the fish (or other soft object) without damaging it.
As part of a project for the ARM Institute, we developed a soft robotic gripper with a tactile sensor for sorting fish be feel. In seafood processing, younger fish are separated from older fish, and workers differentiate them by how soft the fish feels in their hands. We developed a new fabrication method to rapidly prototype durable pneumatic fingers. We then designed a hardness sensor embedded in soft materials and gentle enough to probe the fish (or other soft object) without damaging it.
Unpublished Research Projects
I’ve had a lot of projects that, for various reasons, I never wrote up for peer review. Here are a few of the more interesting.
 I took an interest in making robots that can survive high-speed impacts. The first attempt was a baseball-sized, two-wheeled, spherical robot made from viscoelastic polymers that could survive collisions up to 20 meters per second. The next attempt was a five-kilogram, four-wheeled robot with embedded `breakaway joints’ that survived collisions up to 14 meters per second.
I took an interest in making robots that can survive high-speed impacts. The first attempt was a baseball-sized, two-wheeled, spherical robot made from viscoelastic polymers that could survive collisions up to 20 meters per second. The next attempt was a five-kilogram, four-wheeled robot with embedded `breakaway joints’ that survived collisions up to 14 meters per second.
Haptic Fingers for Virtual Reality
 I prototyped a few wearable devices to simulate tactile interactions in virtual environments, using pneumatics to mimic the normal pressure on fingertips and resistance of holding a rigid object. We experimented with pneumatic bellows and material jamming as actuators, and used soft strain sensors to measure finger displacement.
I prototyped a few wearable devices to simulate tactile interactions in virtual environments, using pneumatics to mimic the normal pressure on fingertips and resistance of holding a rigid object. We experimented with pneumatic bellows and material jamming as actuators, and used soft strain sensors to measure finger displacement.
 We explored two designs for soft/flexible actuators to be used in wearable machines or bio-inspired robots. The first was based on the concept of a liquid metal marble, and used the electrochemical interaction between eutectic Gallium Indium (eGaIn) and an electrolyte to generate pressure and flow under an electric potential. The second was a series of electromagnetic coils in a flexible structure to generate linear motion of a segmented magnetic core.
We explored two designs for soft/flexible actuators to be used in wearable machines or bio-inspired robots. The first was based on the concept of a liquid metal marble, and used the electrochemical interaction between eutectic Gallium Indium (eGaIn) and an electrolyte to generate pressure and flow under an electric potential. The second was a series of electromagnetic coils in a flexible structure to generate linear motion of a segmented magnetic core.