A Method For Building Self-Folding Machines
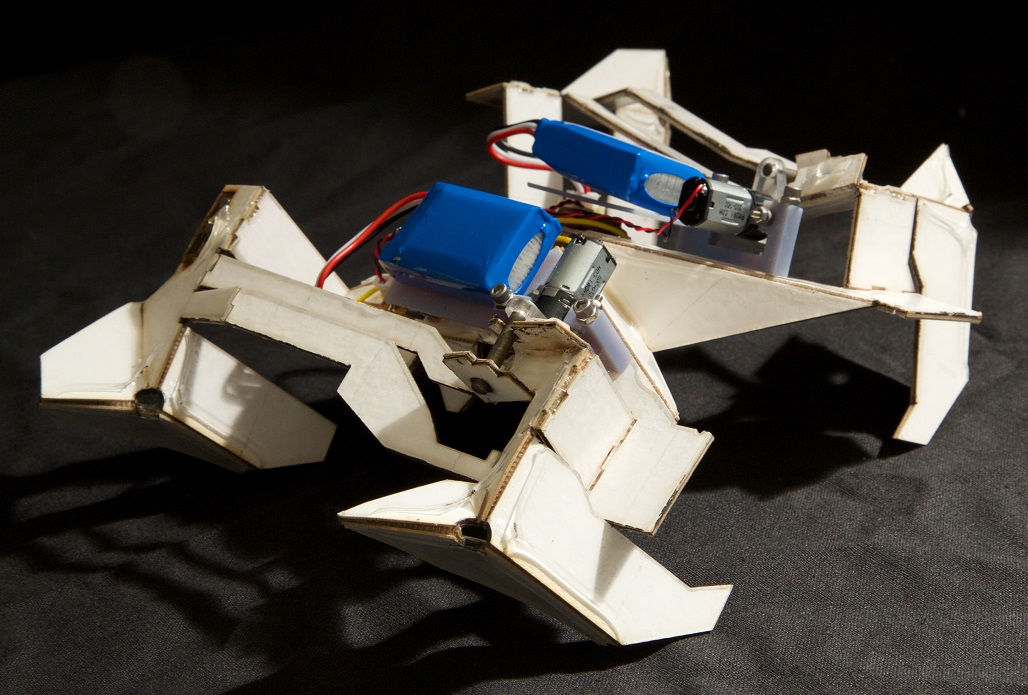
We developed an untethered crawling robot that folds itself in 4 minutes and walks away, all without human intervention. The design is based off of our earlier work on shape memory composites and we advance the concept by integrating the power and controller into the robot body. The design includes fundamental fold patterns and linkage mechanisms that can be extrapolated to a wide range of geometries and mechanisms, demonstrating the flexibility of this approach.
pdfVideo 1
New York Times
NPR
Wall Street Journal