A self-folding pneumatic piston for mechanically robust origami robots
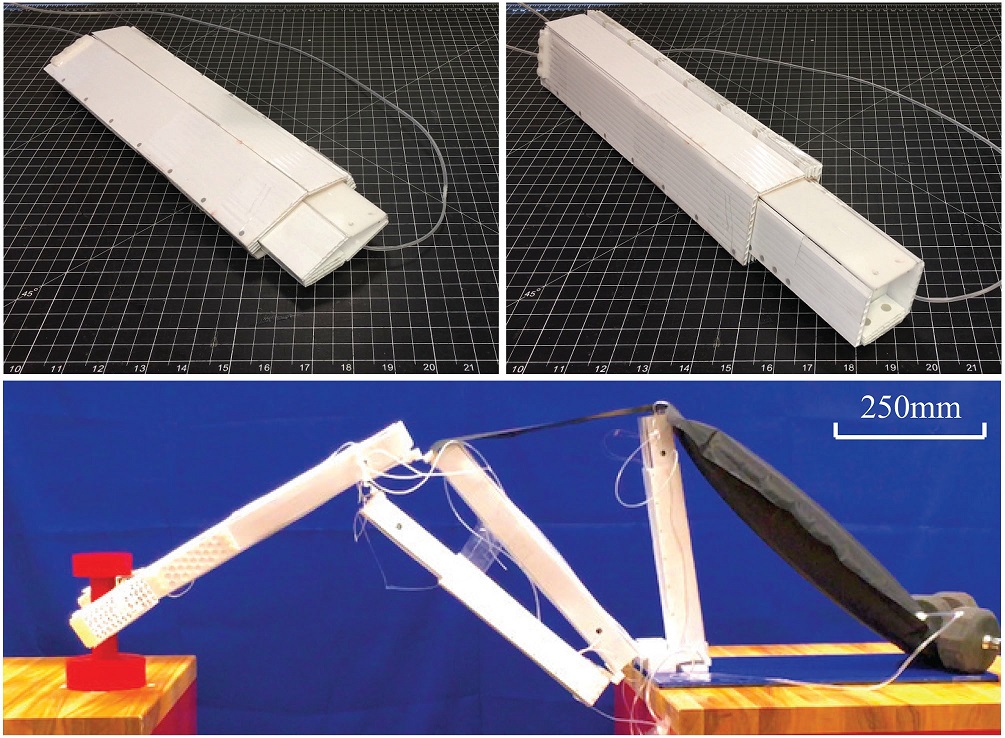
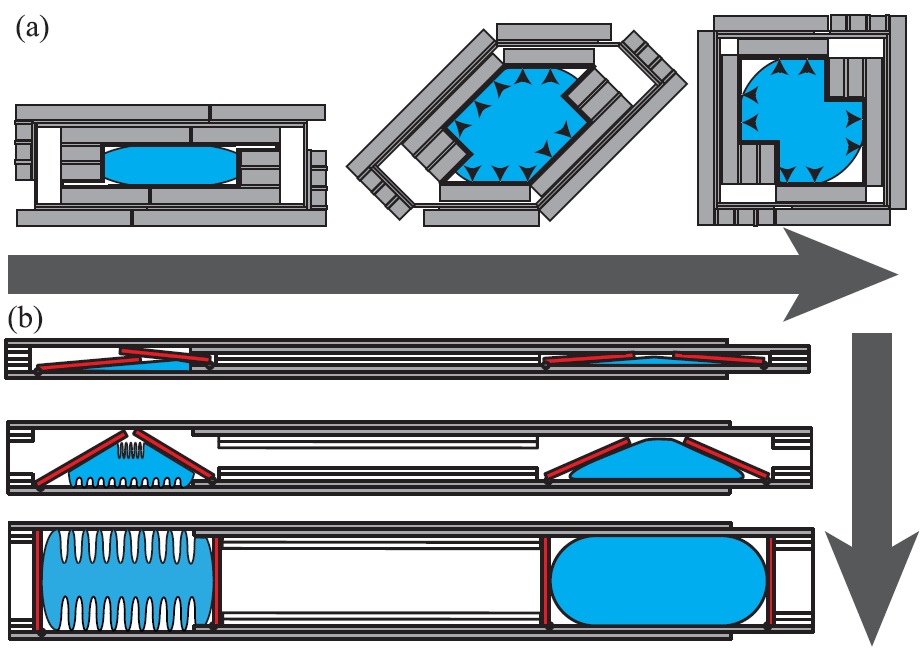
We developed a self-folding piston-style actuator for flat-foldable robots. We characterize the speed and blocked force of this actuator and compare it to a comparable unconstrained pouch in the actuation of a self-folding robotic arm.