Hybrid fabrication of a soft bending actuator with casting and additive manufacturing
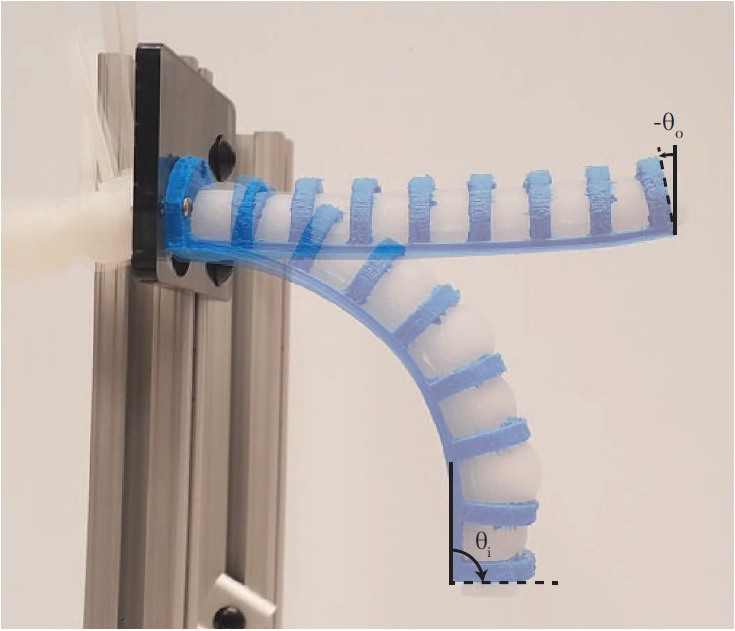
We developed and tested a soft bending actuator that combines casting techniques and additive manufacturing. We demonstrated flexibility in the process by varying the bladder material. We also showed the actuator’s resilience to damage by cutting and puncturing the exoskeleton prior to operation. Finally, we integrated the bending actuator into a three-finger gripper configuration and performed a gripping test for four different objects with various weights and shapes. Results show that the curvature and force obtained in these actuators are comparable to other proposed bending actuators with a faster and more adaptable fabrication process.
pdfVideo 1