Feedback-controlled self-folding of autonomous robot collectives
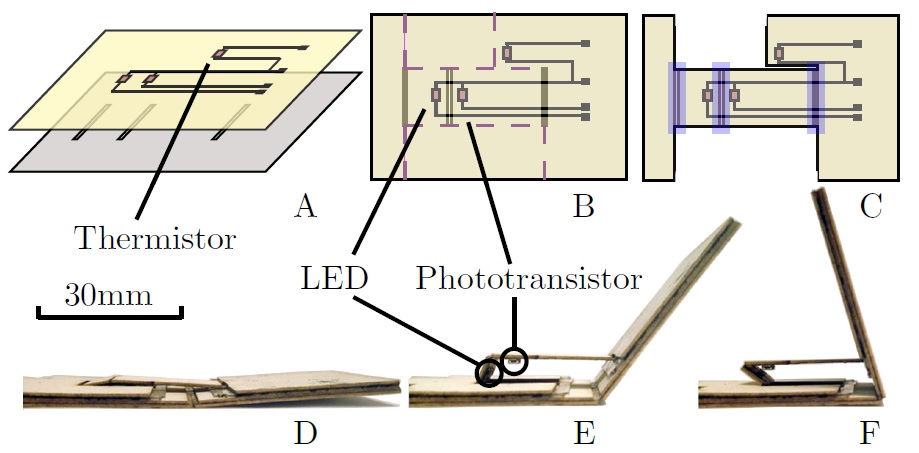
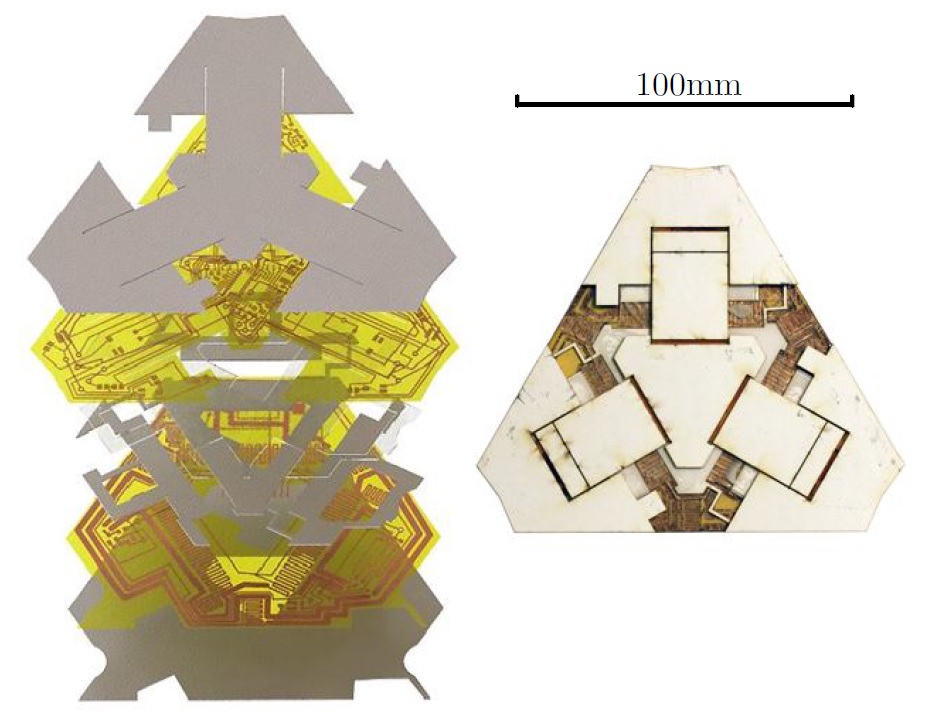
Extending our previous work on shape-memory composites, we demonstrate feedback-controlled self-folding using optical sensors to accurately control folding angles. Using this technique, we build a collective of robots that is manufactured in one continuous laminar composite. Individual robots in the collective detach from one other, self-fold into pre-programmed configurations and navigate by phototaxis.
pdfVideo 1
IEEE Spectrum