Transformation dynamics in origami
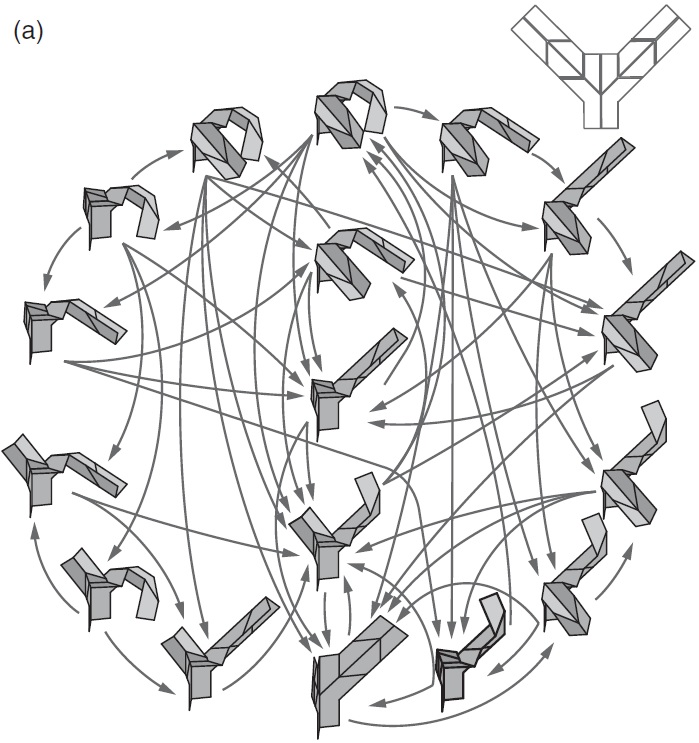
We developed a model to predict and control transformation in dynamic origami systems. The model incorporates a hidden degree of freedom introduced by material compliance in the mechanism. We apply this model to design a branching origami structure with 17 distinct configurations and demonstrate reliable switching between these configurations with a single actuator. Given the fact that origami can replicate almost any shape, we expect that this framework will be applicable to transformation in arbitrary structures and mechanisms.
pdfVideo 1
Phys.org