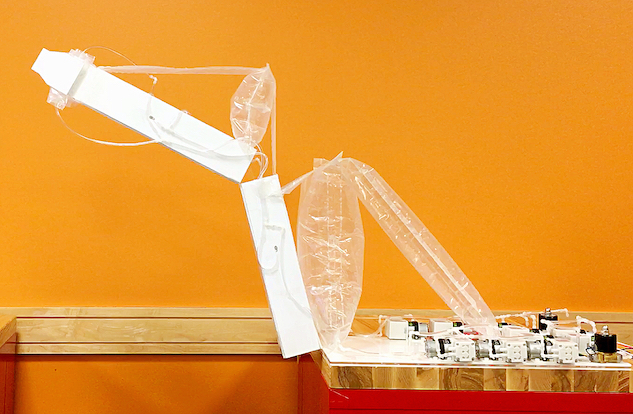
A self-folding robot arm for load-bearing operations
Previous self-folding machines could not generate large forces or bear high loads, so we extended our previous work with pneumatic self-folding to meter-scale, load-bearing structures and mechanisms. We designed, built, and characterized structural beams and pneumatically actuated joints, and integrated these results into a robotic arm that weighs 0.3 kg and can lift up to 1.0 kg.
pdf