Self-folding and self-actuating robots: a pneumatic approach
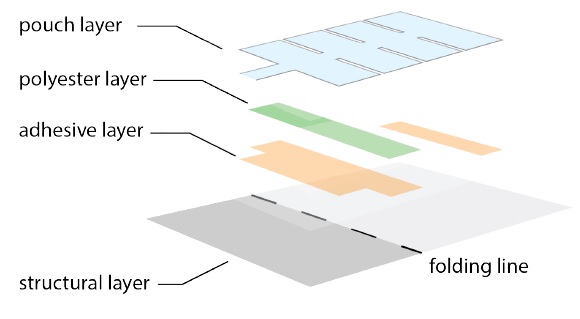
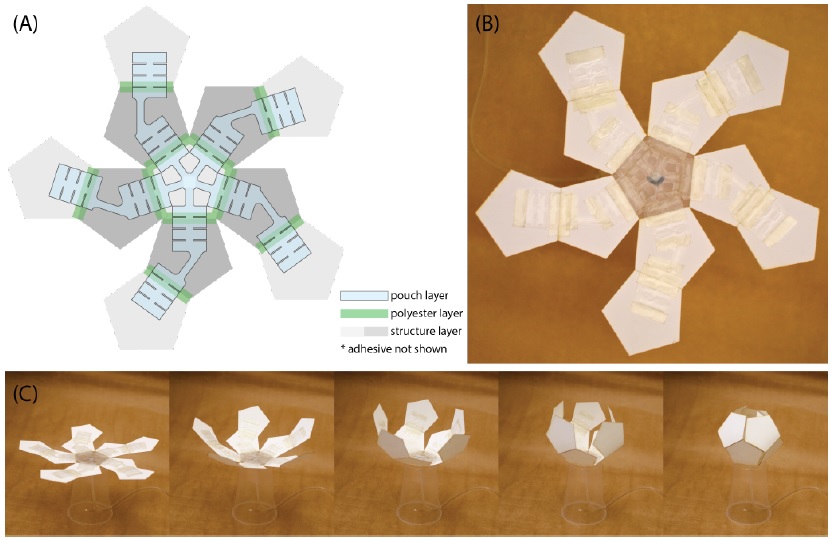
We developed a self-assembling method with planar pneumatic pouches. Inflation of the pouches translate into shape changes, turning a sheet of composite material into a robotic structure. These same pouches act as pneumatic actuators, so the folded machine can move using the same compressed air source, and unfold back to a flat state when its operation is complete
pdfVideo 1