Mechanically programmed miniature origami grippers
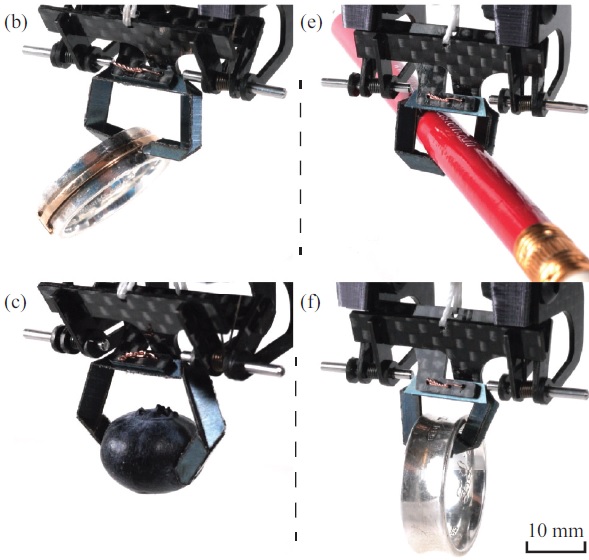
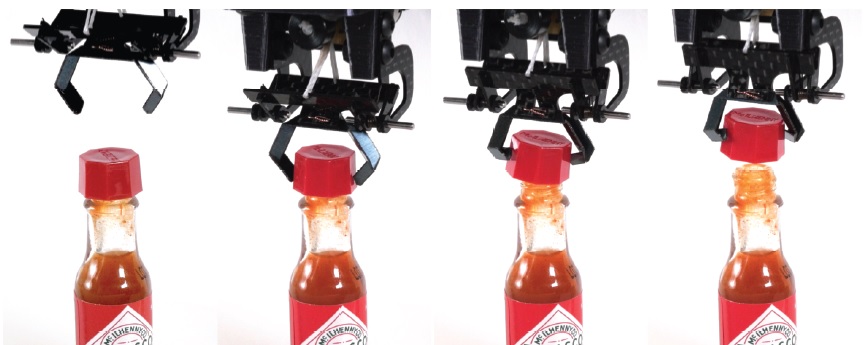
We developed a robotic gripper that can perform customizable grasping tasks at the millimeter scale. By using origami strings, we create miniature fingers that bend at multiple joints with a single actuator input. The shape and stiffness of these fingers can be varied to fit different grasping tasks by changing the crease pattern of the string. We show that the experimental behavior of these strings follows their analytical models and that they can perform a variety of tasks including pinching, wrapping, and twisting common objects such as pencils, bottle caps, and blueberries.
pdfVideo 1