High-Impact Robots
 Near the end of my time at Harvard I took an interest in making robots that can survive impacts with rigid surfaces at terminal velocity, about 40 meters per second (95 miles per hour) depending on the shape. My first design was a roughly spherical robot with flexible wheels that wrapped around the body. The motor and electronics were embedded deeply within the rubber sphere, and flexible bushings supported the wheel axles.
Near the end of my time at Harvard I took an interest in making robots that can survive impacts with rigid surfaces at terminal velocity, about 40 meters per second (95 miles per hour) depending on the shape. My first design was a roughly spherical robot with flexible wheels that wrapped around the body. The motor and electronics were embedded deeply within the rubber sphere, and flexible bushings supported the wheel axles.
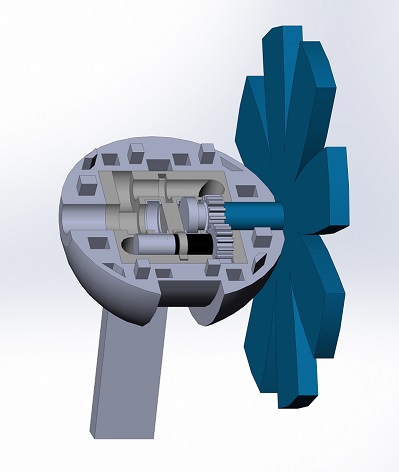
 As part of the design process I used a finite element model to simulate different materials. The sphere was cast in two halves, each consisting of a two-part mold. The components were embedded and the halves were glued together. This glued seam ended up being the weak point of the design, and in the future I would’ve looked into better bonding methods.
As part of the design process I used a finite element model to simulate different materials. The sphere was cast in two halves, each consisting of a two-part mold. The components were embedded and the halves were glued together. This glued seam ended up being the weak point of the design, and in the future I would’ve looked into better bonding methods.
 To test the design, we used a baseball pitching machine that could launch the robot at speeds up to 20 meters per second.
To test the design, we used a baseball pitching machine that could launch the robot at speeds up to 20 meters per second.  The robot was held in a sacrificial plastic shell that shattered on impact. It survived, and was able to drive after the collision. However, the two-wheeled design couldn’t traverse anything but the flat terrain, so its use cases were limited. In addition, we had maxed out the launch speed of the baseball pitcher so we couldn’t reach `terminal velocity’.
The robot was held in a sacrificial plastic shell that shattered on impact. It survived, and was able to drive after the collision. However, the two-wheeled design couldn’t traverse anything but the flat terrain, so its use cases were limited. In addition, we had maxed out the launch speed of the baseball pitcher so we couldn’t reach `terminal velocity’.
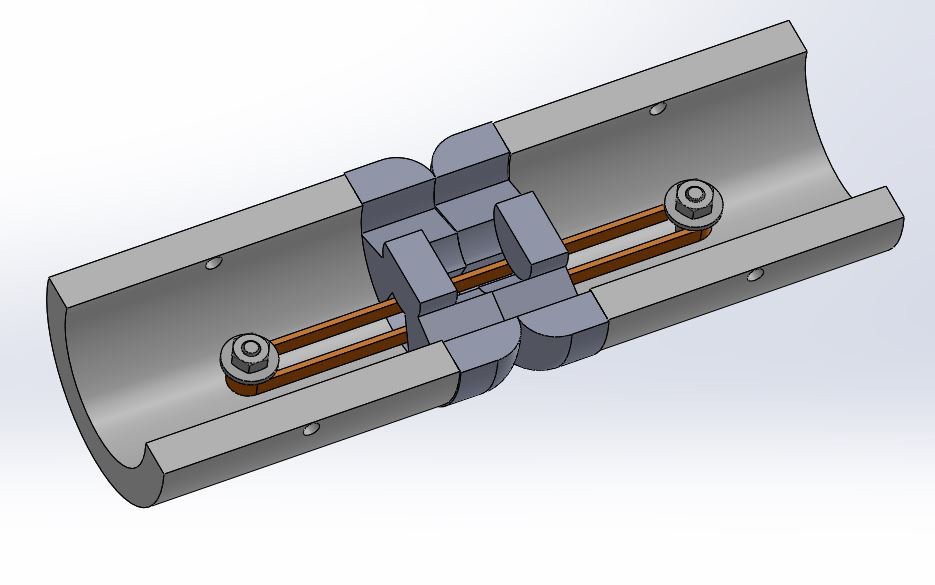
 Once at Northeastern, we took a different approach. This new concept was to break a larger machine into smaller segments connected with `breakaway joints’: mechanical fuses that acted like a rigid connection under operating conditions, but would deflect under high-impact loads. Once it deflected, the joint was designed to absorb and dissipate as much energy as possible while remaining in the elastic regime, so that it would eventually lock back into place.
Once at Northeastern, we took a different approach. This new concept was to break a larger machine into smaller segments connected with `breakaway joints’: mechanical fuses that acted like a rigid connection under operating conditions, but would deflect under high-impact loads. Once it deflected, the joint was designed to absorb and dissipate as much energy as possible while remaining in the elastic regime, so that it would eventually lock back into place.
 We ran some preliminary tests with a four-wheeled, 5 kg machine. We could no longer launch it at high velocities indoors since the kinetic energy was unsafe for any facility we had access to, so we ran a couple experiments by dropping it from a drone at heights of up to 14 meters. The results of these drop experiments varied widely between trials, but it consistently survived at speeds up to 14 meters per second, comparable to other machines that with a tenth of the mass. Unfortunately, we had other priorities and had to mothball this project.
We ran some preliminary tests with a four-wheeled, 5 kg machine. We could no longer launch it at high velocities indoors since the kinetic energy was unsafe for any facility we had access to, so we ran a couple experiments by dropping it from a drone at heights of up to 14 meters. The results of these drop experiments varied widely between trials, but it consistently survived at speeds up to 14 meters per second, comparable to other machines that with a tenth of the mass. Unfortunately, we had other priorities and had to mothball this project.