Shake and take: fast transformation of an origami gripper
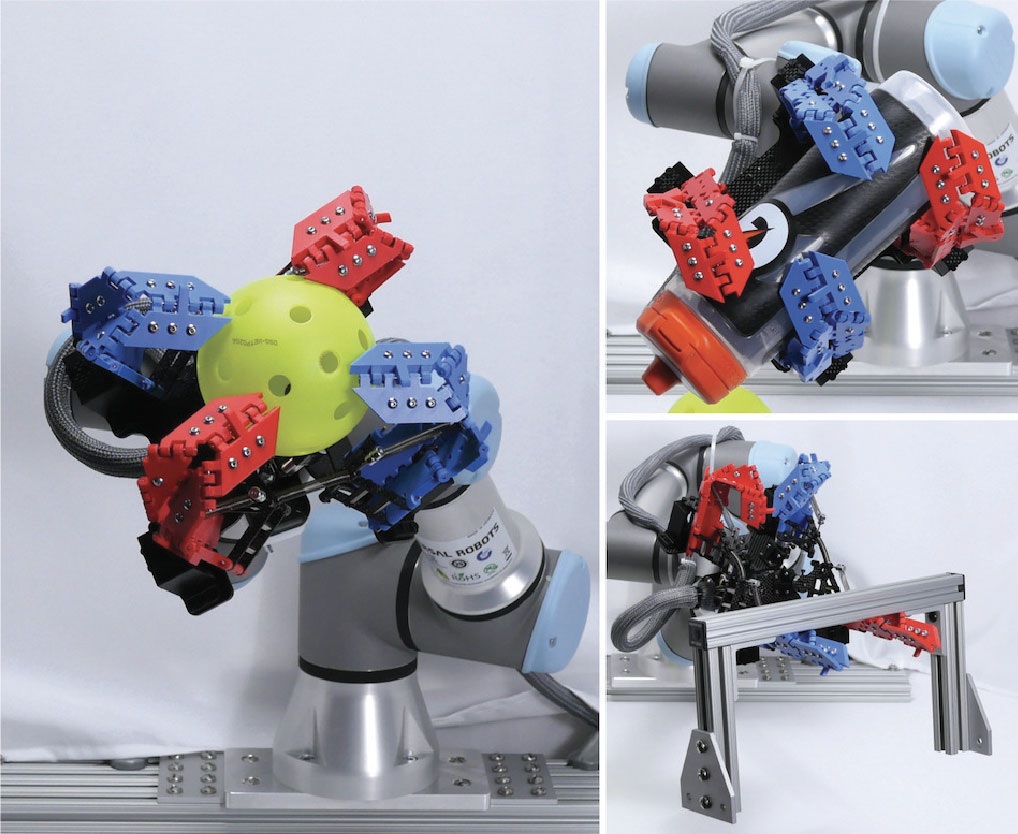
We extended our previous work on dynamic origami transformation to build a gripper that can change its kinematic behavior in less than a second. We modified the hinge design to make the structure stiffer and the transformation more repeatable. Demonstrations show that the gripper can quickly reconfigure between three different grasping modes and has sufficient stiffness to engage with and lift multiple objects with distinct geometries.
pdfVideo 1